In June 2050, the robot soccer team have to win versus the human world champion soccer. That is the goal of the RoboCup federation. After every championship, the newly acquired techniques are shared with eachother. This leads to fast innovations in robotics, to reach our goal in 2050. Soccer robot is exciting, fast, and educative!
There are different competitions, in which students with a technological background can battle each other with their robots. In the Humanoid League, the robots are humanlike, because of they include two legs and two arms. In the Simulation League, Standard Platform League and Small Size League, the focus is on writing the software. The Middle Size League is most similar to the normal human soccer we know. The robots are playing 5 versus 5 with a normal soccer ball on a large field. The Netherlands has one of the current vice worldchampion, namely team TechUnited from Eindhoven. During the RoboCup European Open 2016, you can see matches of the Middle Size League, Small Size League, and Standard Platform League.
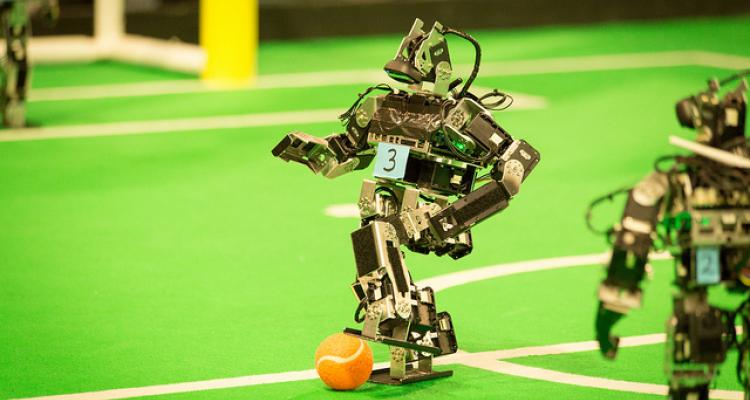
Middle Size League
In the Middle Size League (MSL) two teams of five autonomous robots play soccer on a 18 x 12 meter indoor field. Each robot is equipped with sensors and an on-board computer to analyse the current game situation and successfully play soccer. Through wireless communication the robots can establish inter-team cooperation and receive all referee commands. No external intervention by humans is allowed, except substitutions. The robots have a height of approximately 80 cm.
More information about the Middle Size League can be found here.
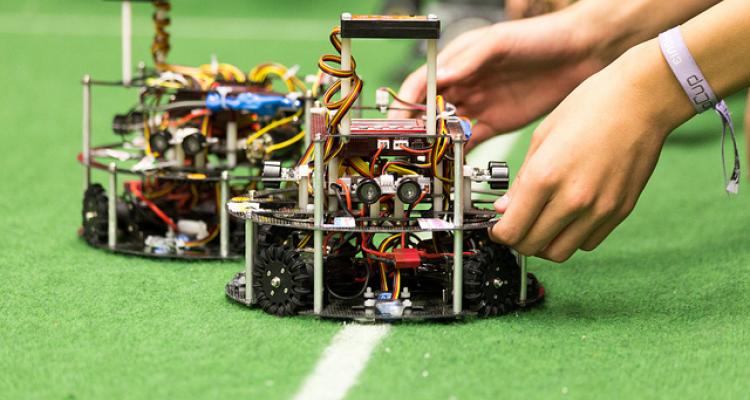
Small Size League
A Small Size robot soccer game takes place between two teams of six robots each. The robot must fit within an 180mm diameter circle and must be not higher than 15 cm. The robots play soccer with an orange golf ball on a green carpeted field that is 6.05 m long by 4.05 m wide.
All objects on the field are tracked by a standardized vision system that processes the data provided by two cameras that are attached to a camera bar located 4 m above the playing surface. The vision system (called SSL-Vision) is an open source project maintained by the league’s community.
Off-field computers are used to communicate referee commands and position information to the robots. Typically, these computers also perform most, if not all, of the processing required for coordination and control of the robots. Communication is wireless and typically uses dedicated commercial FM transmitter/receiver units.
The league’s official website can be found here.
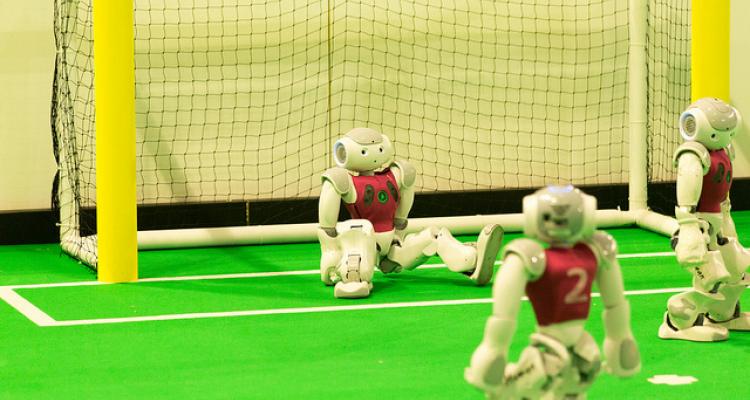
Standard Platform League
In the Standard Platform League, soccer is played with a standardized robot platform, i.e. all teams compete with identical robots and only differ in the software they develop. The robots operate fully autonomously, such that there is no external control by humans or computers. However, the robots can communicate with their teammates and receive the decisions of the referee via wireless communication.
Each game is composed of two 10-minute halves. In these games, teams of five robots play against each other on a 9m x 6m field.
The current standard platform which is used is the humanoid H25 NAO manufactured by Aldebaran Robotics. The H25 NAO robot has 25 actuated joints – five in each leg, five in each arm, one in each hand, two in it’s neck, and one in its hip. In its head, two cameras are integrated for perceiving the environment. In its chest, sonar sensors can measure distances to other object on the field. In its feet there are sensors to measure ground contact and the contact with the ball. One accelerometer with three axis and two gyroscopes each with one axis allow measuring the pose of the robot’s torso.
More information can be found here.