In juni 2050 moet een team van robots kunnen winnen van de menselijke wereldkampioen voetbal. Dat is bij de oprichting van de RoboCup-federatie als doel gesteld. Doordat de robottechnici na ieder toernooi alle kennis met elkaar delen, gaat de technologie enorm hard vooruit en komt het einddoel steeds duidelijker in zicht. Robotvoetbal is spannend, snel en leerzaam!
Er zijn verschillende competities waarin techniekstudenten het met hun robots tegen elkaar opnemen. In een Humanoid league lijken de robots al enigszins op mensen, omdat ze twee benen en twee armen hebben. In de Simulation League, Standard Platform League en Small Size League ligt de nadruk op het schrijven van software. De Middle Size League staat het dichtst bij voetbal zoals we het allemaal kennen. Er wordt vijf tegen vijf gespeeld met een standaard voetbal op een groot veld. Nederland is met team TechUnited Eindhoven de huidige vicewereldkampioen in deze competitie! Tijdens RoboCup European Open 2016 zullen Small Size League en Middle Size League teams het gaan opnemen tegen elkaar. Ook is de Standard Platform League aanwezig tijdens dit event.
Middle Size League
In de Middle Size League spelen twee autonome robotvoetbal teams 5 tegen 5 op een 18x12m indoor voetbalveld. Elke robot is uitgerust met sensoren en een computer om de spelsituaties te analyseren en succesvol voetbal te spelen. Door middel van een draadloos netwerk zijn de robots in staat om met elkaar te communiceren en samen te voetballen. Daarnaast ontvangen ze via het draadloze netwerk scheidsrechterscommando's. The robots zijn ongeveer 80cm hoog.
Meer informatie over de Middle Size League is hier te vinden, op de officiële wiki.
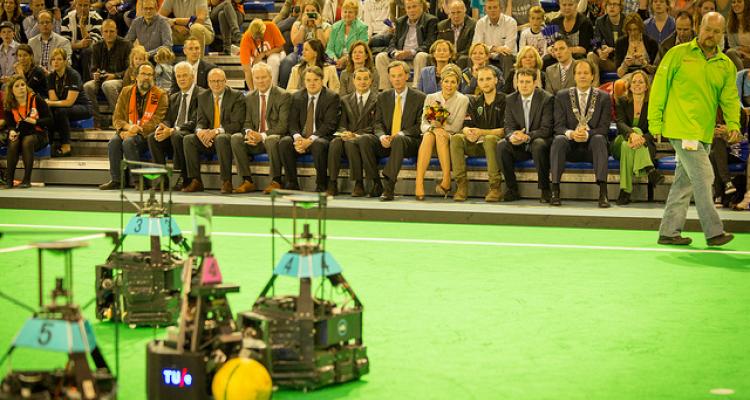
Small Size League
Een voetbalwedstrijd van de Small Size League speelt zich af tussen twee teams van zes robots. De robots zijn kleine ronde schijven met een maximale diameter van 18 cm en mogen niet hoger zijn dan 15cm. De robots spelen voetbal met een oranje golfbal op een groep tapijt van 6x4m groot.
Alle objecten op het veld worden gevolgd door een standaard vision systeem (SSL-Vision). De SSL-vision verwerkt alle data van twee camera's die 4m boven het veld hangen. Het vision systeem is een open source project dat door deze league ontwikkeld is.
Computers buiten het veld worden gebruikt om scheidsrechterscommando's en positie-informatie te communiceren naar de robots. Ook worden deze computers gebruikt voor het berekenen van de nodige informatie voor de robots, zoals coördinatie en control. Alle communicatie is draadloos.
Klik hier voor de officiële website van de Small Size League.
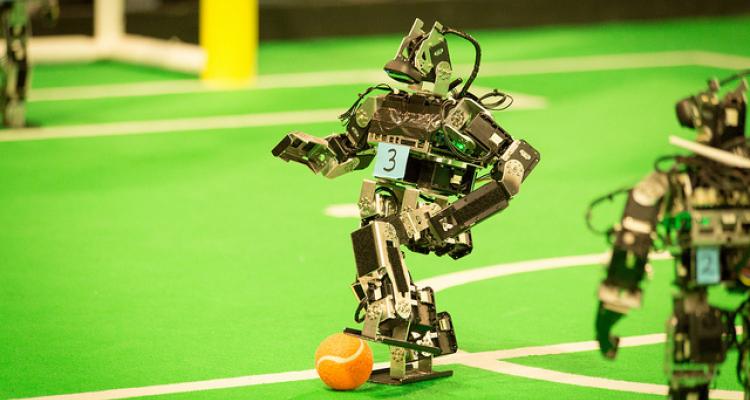
Standard Platform League
In de Standard Platform League spelen robots van een standaard ontwerp voetbal tegen elkaar. Alle teams gebruiken exact hetzelfde robot platform (hardware). Alleen de software is verschillend en wordt door ieder team zelf ontwikkeld. De robots spelen volledig autonoom en worden niet extern bediend door mensen of computers. De robots kunnen wel communiceren met elkaar en ontvangen de beslissingen die de scheidsrechter neemt via een draadloos netwerk.
Elke wedstrijd bestaat uit twee helften van 10 minuten. In deze wedstrijden spelen teams van ieder 5 robots tegen elkaar op een 9x6m groen voetbalveld.
Het huidige standaard robot platform dat gebruikt wordt in de competitie is de humanoid H25 NAO, ontwikkeld door Aldebaran Robotics. De H25 NAO heeft 25 geactueerde vrijheden - vijf in ieder been, vijf in iedere arm, één in ieder hand, twee in de nek en één in de heupen. In het hoofd zijn twee camera's geïntegreerd om zijn omgeving mee waar te nemen. In de borstkast zijn sensoren geplaatst waarmee afstanden gemeten kunnen worden tot een ander object op het veld. In de voeten zitten sensoren om het contact met de grond en de bal te meten.
Meer informatie over het Standard Platform is hier te vinden.